
This post is also available in: Englisch
- Kontinuierliche Eigenüberwachung zweier unabhängiger Steuergeräte erkennt eventuell auftretende Systemunsicherheiten und bildet die notwendige Redundanz und Diversität, um ein Fahrzeug immer zuverlässig anhalten zu können.
- Continental setzt diese Architektur bereits bei der Cruising Chauffeur-Funktion für hochautomatisiertes Fahren auf der Autobahn ein.
Las Vegas, NV, USA, 10. Januar 2018. Mit einer speziellen Elektronik-Architektur fügt Continental dem hochautomatisierten Fahren eine weitere Sicherheitsebene hinzu. Zusätzlich zu einem zentralen Steuergerät für automatisiertes Fahren, der Assisted & Automated Driving Control Unit, setzt das Technologieunternehmen eine Safety Domain Control Unit als Rückfallebene ein, um das Fahrzeug auch bei einem möglichen Funktionsausfall im primären Automationspfad sicher anzuhalten (Safe Stop). Damit baut Continental konsequent auf die in der Luftfahrt bewährten Prinzipien der Redundanz und des diversitären Designs: Für jedes zentrale System gibt es eine oder mehrere Rückfallebenen, welche unabhängig voneinander sind. Weil die SDCU gleichzeitig die Funktion des Airbagsteuergerätes übernimmt, ist deren Hochverfügbarkeit inklusive Energiereserve und einem crash-sicheren Verbauort im Fahrzeug sichergestellt.

Mit der zusätzlichen Rückfallebene der SDCU sorgt Continental dafür, dass das Fahrzeug auch dann in einen sicheren Zustand gebracht wird, wenn die Hauptautomation ausfällt. Klassische, heute im Einsatz befindliche, sicherheitsrelevante Systeme sind nach dem sogenannten Fail-Safe-Prinzip konstruiert. Das heißt, wenn im System eine Störung vorliegt, wird die Sicherheit aufrechterhalten, indem das fehlerhafte System außer Betrieb genommen wird. Dieser Ansatz ist möglich, weil der Fahrer als unabhängige Rückfallebene zur Verfügung steht und die Aufgaben beispielsweise des Bremsens und Lenkens noch mit seiner Muskelkraft bewältigen kann.
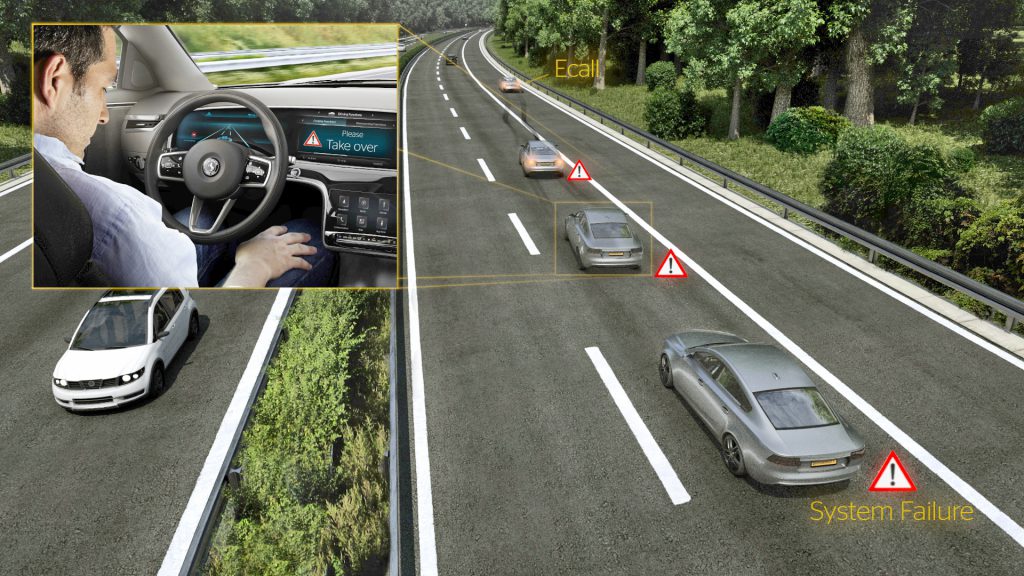
„Genau diese Rückfallebene steht bei hochautomatisierten Fahrzeugen eventuell nicht zur Verfügung, denn der Fahrer darf sich anderweitig beschäftigen und kann nicht unmittelbar aufgefordert werden, nach einem möglichen Ausfall in Sekundenbruchteilen die Fahrzeugführung zu übernehmen“, erklärte Maged Khalil, Leiter Advanced Systems Architecture Design bei Systems & Technology in der Division Chassis & Safety. Jedes hochautomatisierte Fahrzeug muss deshalb in der Lage sein, selbsttätig anzuhalten. Darauf sind Level-4-Fahrzeuge wie der Cruising Chauffeur von Continental vorbereitet. Tritt der Fahrer trotz Aufforderung nicht in Aktion, so führt das Auto ein Minimum Risk Manöver durch. Dabei fährt das Fahrzeug entweder selbsttätig auf den Standstreifen und hält dort an oder – falls kein Standstreifen existiert, beziehungsweise dieser blockiert ist – hält es mit eingeschaltetem Warnblinker in der Fahrspur an oder fährt mit abnehmender Geschwindigkeit weiter, bis es einen passenden Haltepunkt für einen Safe Stop findet.
Ist der Fahrer nicht mehr als Rückfallebene verfügbar, muss von einem Fail-Safe auf ein Fail-Operational-Prinzip umgestellt werden, welches die Funktionalität in jedem Fall aufrechterhält. „Mit der Rückfallebene eines zweiten, unabhängigen Steuergerätes, das ebenfalls in der Lage ist, das Auto anzuhalten, bekommt ein hochautomatisiertes Fahrzeug ein Auffangnetz“, so Khalil weiter. „Damit ist das Fahrzeug bei einer Störung noch in der Lage, auch ohne Fahrereingriff einen sicheren Zustand herbeizuführen. Das ist eine entscheidende Vertrauensgrundlage für die Akzeptanz des automatisierten Fahrens.“
Zwei Automationspfade – ein Ziel: Safe Stop
Ein Safe Stop muss auch dann selbsttätig erfolgen, wenn das Fahrzeug durch Selbstdiagnose eine Unsicherheit im System erkennt und die Fahrfunktion weder vom primären Automationspfad noch vom Fahrer aufrechterhalten werden kann. „Der primäre Automationspfad muss sich ohne Beeinträchtigung der Sicherheit auch ausschalten können“, erläuterte Bardo Peters, Leiter Innovationsmanagement Occupant Safety & Inertial Sensors im Geschäftsbereich Passive Safety & Sensorics, die Herangehensweise. „Nur durch echte Redundanz lassen sich alle möglichen Ausfallszenarien abdecken.“ Die vollständig vom zentralen Steuergerät, wie der Assisted & Automated Driving Control Unit, unabhängige SDCU verfügt selbst über eine für die Aufgabe des Minimum Risk Manövers ausgelegte Automationslösung.
Sowohl das zentrale Steuergerät als auch die SDCU überwachen sich im Hinblick auf Verfügbarkeit und Funktionsfähigkeit permanent selbst. Sollte auch nur ein Pfad nicht mehr in der Lage sein, das Fahrzeug sicher zu steuern oder das Minimum Risk Manöver auszuführen, leitet der andere Pfad im Notfall den Safe Stop ein. „Diese permanente Überwachung erkennt, wenn ein Pfad nicht mehr zur Verfügung steht. Deshalb würde in solchen Situationen der jeweils andere Pfad das Minimum Risk Manöver ausführen“, ergänzte Dr. Lutz Kühnke, Leiter Segment Occupant Safety & Inertial Sensors im Geschäftsbereich Passive Safety & Sensorics. Der Eingriff der Rückfallebene folgt einem fein abgestuften Degradationskonzept, je nach Schwere des erkannten Problems. Für die Selbstüberwachung sowie die gegenseitige Überwachung der Pfade nutzt Continental innovative Softwarefunktionen wie ein effektives Fehlermanagement und die intelligente Überwachung der Signalkonsistenzen.
Kontakt für Journalisten
Sören Pinkow
Externe Kommunikation
Continental
Division Chassis & Safety
Guerickestr. 7
60488 Frankfurt am Main
Telefon: +49 69 7603-8492
Email: soeren.pinkow@continental-corporation.com
Miriam Baum
Externe Kommunikation
Continental
Division Chassis & Safety
Guerickestr. 7
60488 Frankfurt am Main
Telefon: +49 69 7603-9510
E-Mail: miriam.baum@continental-corporation.com

